















Modélisation du comportement dynamique : une étude de cas complète sur les machines à états UML 2.0
Introduction
Les systèmes logiciels modernes sont rarement statiques. Les objets, composants et services évoluent continuellement, réagissant aux entrées utilisateur, aux messages réseau, aux signaux matériels et aux minuteries internes. Bien que la modélisation structurelle excelle à définirce que un système est composé, elle est insuffisante pour capturercomment ces composants se comportent au fil du temps. C’est là que la modélisation comportementale devient indispensable.
Les diagrammes de machines à états fournissent une approche rigoureuse et standardisée pour cartographier le cycle de vie dynamique d’un objet. En définissant explicitement les conditions, les événements et les règles régissant les changements d’état, les ingénieurs peuvent éliminer toute ambiguïté, prévenir les anomalies à l’exécution et concevoir des architectures hautement maintenables. Cette étude de cas explore les mécanismes fondamentaux des machines à états UML 2.0, démontre leur application pratique à travers des scénarios de modélisation réels, et expose des pratiques d’ingénierie éprouvées pour concevoir des modèles comportementaux prévisibles et évolutifs.
1. Mécanismes fondamentaux des machines à états
1.1 États et frontières du cycle de vie
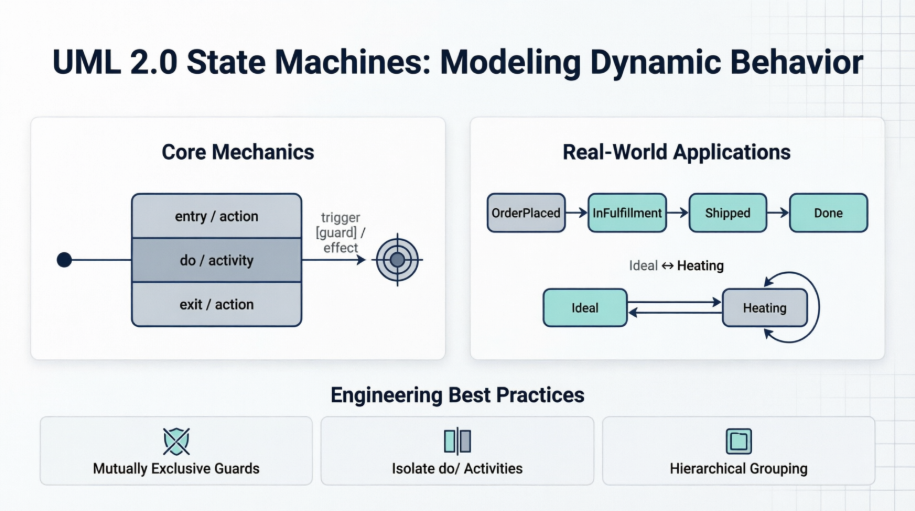
Unétat représente une condition distincte dans le cycle de vie d’un objet où il satisfait des invariants spécifiques, effectue un travail en cours ou attend des stimuli. Les transitions d’état sont déclenchées par des événements discrets, provoquant le passage de l’objet d’une configuration à une autre.
Chaque machine à états valide repose sur deux nœuds frontières critiques :
-
Pseudostat initial : noté par un cercle plein noir. Il sert de point d’entrée unique, définissant l’endroit où l’exécution commence.
-
État final : représenté par une cible (cercle plein à l’intérieur d’un anneau). Il marque le point terminal du cycle de vie, indiquant que l’objet a accompli sa fonction et ne traitera plus d’événements.
1.2 Compartiments de comportement interne
Les états ne sont pas simplement des conteneurs passifs ; ils peuvent héberger des comportements internes qui s’exécutent à des moments précis du cycle de vie :
-
entrée /: déclenché instantanément lors du passage dans l’état. Utilisé pour l’initialisation, la mise à jour de drapeaux ou l’allocation de ressources. -
sortie /: exécuté immédiatement avant de quitter l’état. Gère généralement le nettoyage, la journalisation ou la libération des ressources. -
faire /: représente une activité continue et interrompable qui s’exécute pendant toute la durée où l’objet reste dans l’état. Contrairement àentrée/sortie,faireles activités peuvent être suspendues ou interrompues par des événements entrants.
1.3 Anatomie et topologie des transitions
Les transitions sont des relations orientées régies par une syntaxe stricte :
déclencheur [garde] / effet
| Composant | Objectif |
|---|---|
| Déclencheur | L’événement qui active la transition (par exemple, appel de méthode, signal, expiration du temps). |
| Garde | Une expression booléenne dans [crochets]. La transition ne se poursuit que si l’expression évalue à vrai. |
| Effet | Une action atomique suivant le / qui s’exécute pendant le chemin de transition, après avoir quitté la source mais avant d’entrer dans la cible. |
Topologies des transitions :
-
Externe: Traverse les limites des états. Déclenche à la fois les comportements
sortieetentréede comportement. -
Interne: Gère un événement tout en restant dans le même état. Préserve l’activité active
faireactivité et ignoresortie/entréeexécutions.
2. Étude de cas appliquée : Modélisation des systèmes dynamiques
Pour démontrer comment ces mécanismes se traduisent en modèles prêts à être déployés, nous examinons deux sous-systèmes interconnectés au sein d’une architecture distribuée moderne : un processeur de commandes e-commerce et un contrôleur environnemental IoT.
2.1 Scénario A : Cycle de vie de la livraison des commandes e-commerce
L’Commande entité doit suivre une progression stricte depuis la création jusqu’à la livraison, avec des branches conditionnelles pour les annulations et une journalisation stricte à chaque phase. Les actions internes entrée/sortie actions garantissent que les traçages d’audit et les notifications entrepôt sont déconnectés des transitions d’état principales.
@startuml
title Cycle de vie de la commande en ligne (États et transitions)
' 1. Entrée de la machine à états
[*] --> OrderPlaced : checkoutCompleted
' 2. Déclarations de boîtes d'états avec comportements internes
state OrderPlaced {
entrée : logOrderCreation()
sortie : notifyWarehouse()
}
state InFulfillment {
entrée : assignPicker()
do : assemblePackageContents()
}
state Shipped {
entrée : generateTrackingNumber()
}
state Cancelled {
entrée : initiateRefund()
}
' 3. Matrice de routage des transitions avec gardes et effets
OrderPlaced --> InFulfillment : paymentVerified / authorizeLogistics()
InFulfillment --> Shipped : packageScanned [StockConfirmed] / emailCustomer()
' Chemin alternatif d'erreur utilisant une garde et un layout de routage clair vers le bas
OrderPlaced -down-> Cancelled : cancelRequested [Within24Hours]
Shipped --> [*] : deliveryConfirmed
@endumlAnalyse de l’étude de cas :
-
Limites du cycle de vie: Le diagramme commence à
[*]et se termine à[*]uniquement aprèsdeliveryConfirmed, ce qui impose un chemin de succès clair. -
Comportements internes:
logOrderCreation()etnotifyEntrepot()sont isolés àentrée/sortie, en s’assurant qu’elles se déclenchent de manière déterministe, quelle que soit la transition qui active l’état. -
Acheminement contrôlé: La transition de
EnExécutionversExpédiérequiert[StockConfirmé], empêchant l’expédition prématurée lorsque les vérifications de stock échouent. Le[DansLes24Heures]garde sur le chemin d’annulation s’assure que les remboursements ne sont déclenchés que dans une fenêtre de politique stricte.
2.2 Scénario B : Contrôleur environnemental IoT
Les contrôleurs matériels nécessitent des opérations en arrière-plan continues (faire activités) mais doivent également gérer les mises à jour fréquentes des capteurs sans perturber les routines critiques de gestion thermique. Les transitions internes fournissent l’efficacité nécessaire.
@startuml
skinparam style strictuml
title Thermostat intelligent - Contrôleur environnemental
[*] --> Veille
state Veille {
entrée / afficherTempActuelle()
}
state Chauffage {
entrée / ouvrirVanneGaz()
' Activité de traitement continue
début / faireTournerVentilateursChauffe()
sortie / fermerVanneGaz()
' Transition interne : Gère un événement sans déclencher la logique d'entrée/sortie
Chauffage : tempCalibrée / recalculerTauxCombustion()
}
' Transitions externes provoquant des perturbations d'entrée/sortie d'état
Veille --> Chauffage : tempChute [TempCible > TempActuelle]
Chauffage --> Veille : tempAtteinte [TempActuelle >= TempCible] / déclencherBipAlerte()
@endumlAnalyse de cas :
-
Opérations continues:
faire / faireTournerVentilateursChauffe()s’exécute indéfiniment pendant qu’il est dansChauffage, modélisant un processus physique qui persiste jusqu’à interruption. -
Efficacité des transitions internes: Le
tempCalibrée / recalculateBurnRate()événement est géré internement. Le thermostat recalculer son taux de combustion sans fermer la vanne à gaz (sortie) ou en la rouvrant (entrée), empêchant les accès dangereux au matériel. -
Changement d’état protégé: Le
[TempCible > TempActuelle]et[TempActuelle >= TempCible]les gardes assurent que le système ne bascule que entreInactifetChauffagelorsque les seuils thermodynamiques sont franchis légitimement.
3. Meilleures pratiques en génie
Concevoir des machines d’état robustes exige de la discipline. Les lignes directrices suivantes préviennent les pièges courants de modélisation et améliorent la prévisibilité du système :
1. Appliquer des gardes mutuellement exclusives
Lorsque plusieurs transitions partagent le même déclencheur à partir d’un seul état, leurs conditions de garde doivent être strictement non chevauchantes. Des gardes chevauchantes introduisent une non-déterminisme, obligeant le moteur d’exécution à choisir arbitrairement un chemin. Exemple :[inventaire > 0] contre [inventaire == 0] garantit un seul chemin valide.
2. Isoler doActivités à partir des actions instantanées
entrée et sortie les comportements doivent s’exécuter de manière atomique et sans interruption. Réservez-les pour l’initialisation d’état, la mise à jour des indicateurs ou le nettoyage synchrone. Les processus longs, les écouteurs d’événements ou les boucles d’interrogation appartiennent exclusivement à des faire / compartiments, où ils peuvent être interrompus ou préemptés en toute sécurité par des déclencheurs à priorité plus élevée.
3. Évitez le « spaghetti » de transitions grâce au regroupement hiérarchique
Un réseau dense de transitions transversales indique une frontière mal définie. Si plusieurs états partagent des chemins d’erreur ou d’annulation identiques, encapsulez-les dans un État composite. Cela réduit le désordre visuel, impose une conception modulaire et rend le chemin d’exécution principal immédiatement reconnaissable.
4. Optimisez la disposition du diagramme et la clarté de la syntaxe
-
Adhésion stricte à la syntaxe: Formatez toujours les transitions comme suit
déclencheur [garde] / effet. Omettez proprement les composants inutilisés plutôt que de laisser des barres obliques pendantes ou des crochets vides. -
Contrôle du flux directionnel: Utilisez des directives de disposition (par exemple,
-droite->,-bas->) pour guider le chemin principal « heureux » verticalement ou horizontalement, en acheminant les exceptions et les états d’erreur vers la périphérie. -
Expressions de garde concises: Gardez les conditions booléennes courtes et spécifiques au domaine. Remplacez le langage naturel verbeux par des identifiants précis (par exemple,
[PossèdeUnJetonValide]plutôt que[Si le service d'authentification confirme que la session est active et autorisée]).
Conclusion
Les diagrammes d’états ne sont pas simplement des éléments de documentation ; ils sont des plans exécutables pour le comportement dynamique des systèmes. En définissant rigoureusement les états, les comportements internes et les règles de transition, les ingénieurs peuvent éliminer toute ambiguïté au moment de l’exécution, imposer des contraintes métier au niveau du modèle, et créer des systèmes capables de réagir de manière prévisible face à des flux d’événements complexes.
Les études de cas présentées démontrent comment les machines à états UML 2.0 s’échelonnent des flux de travail métier de haut niveau aux boucles de contrôle matérielle de bas niveau. En combinant une conception disciplinée des gardes, une compartimentation comportementale appropriée et une architecture visuelle claire, la modélisation des états devient un outil puissant pour combler le fossé entre les exigences abstraites et l’implémentation déterministe. Maîtriser ces mécanismes garantit que chaque objet de votre système sait exactement ce qu’il fait, pourquoi il le fait et précisément où il doit aller ensuite.
