















動的動作のモデリング:UML 2.0ステートマシンにおける包括的な事例研究
序論
現代のソフトウェアシステムはほとんど常に静的ではない。オブジェクト、コンポーネント、サービスは、ユーザー入力、ネットワークメッセージ、ハードウェア信号、内部タイマーに反応しながら継続的に進化する。構造モデリングは、システムが何から構成されているかを定義する点で優れているが、何システムが何から構成されているかを定義する点で、その構成要素が時間とともにどのように振る舞うかを捉える点で不足している。どのようにその構成要素が時間とともにどのように振る舞うかを捉える点で不足している。ここが行動モデリングが不可欠となる場所である。
ステートマシン図は、オブジェクトの動的ライフサイクルをマッピングする厳密で標準化されたアプローチを提供する。状態変化を規定する条件、イベント、ルールを明確に定義することで、エンジニアは曖昧性を排除し、実行時異常を防ぎ、保守性の高いアーキテクチャを構築できる。この事例研究では、UML 2.0ステートマシンの基本的なメカニズムを検討し、実世界のモデリングシナリオを通じてその実用的応用を示し、予測可能でスケーラブルな行動モデルを設計するための検証済みのエンジニアリング手法を提示する。
1. ステートマシンの基礎的メカニズム
1.1 状態とライフサイクルの境界
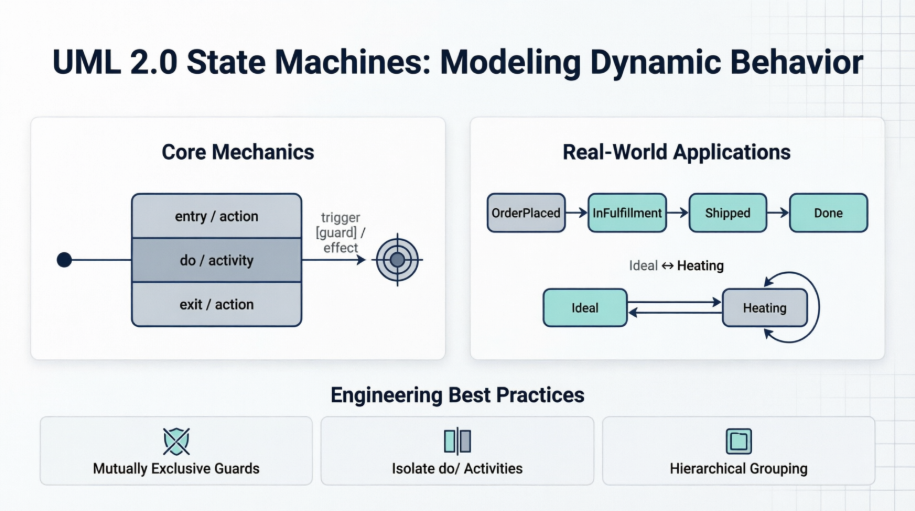
A 状態状態は、オブジェクトのライフサイクルにおいて特定の不変条件を満たす、継続的な作業を実行する、または刺激を待つという明確な状態を表す。状態遷移は離散的なイベントによって引き起こされ、オブジェクトが一つの構成から別の構成へと境界を越える。
すべての有効なステートマシンは、二つの重要な境界ノードによって支えられている:
-
初期擬態状態:実線の黒丸で表される。これは唯一のエントリポイントであり、実行が開始される場所を定義する。
-
最終状態:ダブルサークル(リング内の実線の円)で表される。これはライフサイクルの終端ポイントを示し、オブジェクトが目的を完了し、イベントの処理を一切行わなくなることを意味する。
1.2 内部行動コンパートメント
状態は単なる受動的なコンテナではない。ライフサイクルの特定の瞬間に実行される内部行動を保持することができる:
-
entry /:状態に入り込んだ瞬間に発火する。初期化、フラグの更新、リソースの割り当てに使用される。 -
exit /:状態を離れる直前に実行される。通常、クリーンアップ、ログ記録、リソース解放を担当する。 -
do /:オブジェクトが状態に存在する期間中、継続的かつ中断可能な活動を表す。entry/exit,doアクティビティは、到着するイベントによって一時停止または中断されることがある。
1.3 遷移の構造とトポロジー
遷移は厳密な構文に従う有向関係である:
トリガー [ガード] / 効果
| コンポーネント | 目的 |
|---|---|
| トリガー | 遷移を活性化するイベント(例:メソッド呼び出し、シグナル、時間の経過)。 |
| ガード | ブール式で、[角かっこ]。遷移は、式の評価結果が true. |
| 効果 | 遷移パス中に実行される原子的アクションで、/ソースを退出した後、ターゲットに進入する前に行われる。 |
遷移のトポロジー:
-
外部:状態境界を越える。両方の
exitおよびentry動作を発火する。 -
内部:同じ状態のままイベントを処理する。アクティブな
doアクティビティを保持し、終了/入力実行。
2. 応用事例:動的システムのモデリング
これらのメカニズムが本番環境対応のモデルにどのように変換されるかを示すために、現代の分散アーキテクチャ内の2つの相互接続されたサブシステムを検討する:電子商取引の注文処理システムとIoT環境制御システム。
2.1 シナリオA:電子商取引の注文履行ライフサイクル
The 注文 エンティティは、キャンセルのための条件付き分岐と各フェーズでの厳密なログ記録を伴い、作成から履行への厳密な進行を経なければならず。内部 入力/終了 アクションにより、監査トレールと倉庫通知がコアの状態遷移から分離されていることが保証される。
@startuml
title オンライン注文ライフサイクル(状態と遷移)
' 1. 状態機械の入力
[*] --> 注文済み : クレジットチェック完了
' 2. 内部動作を伴う状態ボックス宣言
state 注文済み {
入力 : 注文作成ログ記録()
終了 : 倉庫に通知()
}
state 履行中 {
入力 : ピッカーを割り当てる()
do : パッケージ内容を組み立てる()
}
state 発送済み {
入力 : 追跡番号を生成する()
}
state キャンセル済み {
入力 : 返金を開始する()
}
' 3. ガードと効果を伴う遷移ルーティングマトリクス
注文済み --> 履行中 : 支払い確認済み / 物流を承認する()
履行中 --> 発送済み : パッケージスキャン済み [在庫確認済み] / 顧客にメール送信()
' ガードを使用した代替エラールートと明確な下向きルーティングレイアウト
注文済み -down-> キャンセル済み : キャンセル依頼 [24時間以内]
発送済み --> [*] : 配達完了
@enduml事例分析:
-
ライフサイクルの境界:図は
[*]で始まり、[*]に終了するが、それは配達完了によって、明確な成功経路が強制される。 -
内部動作:
注文作成ログ記録()およびnotifyWarehouse()は に限定されるentry/exit、どの遷移が状態を活性化しても、確定的に発火することを保証する。 -
ガード付きルーティング: からの遷移
InFulfillmentからShippedは を必要とする[StockConfirmed]、在庫確認が失敗した場合に早期出荷が発生することを防ぐ。[Within24Hours]キャンセル経路のガードは、返金が厳格なポリシー期間内でのみ発動されることを保証する。
2.2 シナリオB:IoT環境制御装置
ハードウェアコントローラは、継続的なバックグラウンド操作(do 活動)を必要とするが、同時に重要な熱管理ルーチンを妨げることなく、高頻度のセンサー更新を処理しなければならない。内部遷移は必要な効率性を提供する。
@startuml
skinparam style strictuml
title スマート暖房機 - 環境制御装置
[*] --> Idle
state Idle {
entry / displayCurrentTemp()
}
state Heating {
entry / openGasValve()
' 継続的な処理活動
do / runFurnaceFans()
exit / closeGasValve()
' 内部遷移:entry/exitロジックを発火させずにイベントを処理
Heating : tempCalibrated / recalculateBurnRate()
}
' 外部遷移:状態のentry/exitを中断する
Idle --> Heating : tempDropped [TargetTemp > CurrentTemp]
Heating --> Idle : tempReached [CurrentTemp >= TargetTemp] / triggerAlertBeep()
@enduml事例分析:
-
継続的運用:
do / runFurnaceFans()は にいる間、無期限に実行される加熱、中断されるまで継続する物理プロセスをモデル化している。 -
内部遷移効率:その
tempCalibrated / recalculateBurnRate()イベントは内部的に処理される。暖房機はガス弁を閉じること(exit)または再開すること(entry)なしで燃焼速度を再計算するため、危険なハードウェアの過剰動作を防ぐ。 -
ガード付き状態切り替え:その
[TargetTemp > CurrentTemp]と[CurrentTemp >= TargetTemp]ガードは、システムが熱力学的閾値が正当に越えられたときのみ、アイドルと加熱の間で切り替わることを保証する。
3. エンジニアリングのベストプラクティス
堅牢な状態機械を設計するには、規律が必要である。以下のガイドラインは、一般的なモデル化の落とし穴を防ぎ、システムの予測可能性を向上させる。
1. 相互に排他的なガードを強制する
複数の遷移が単一の状態から同じトリガーを共有する場合、そのガード条件は厳密に重複してはならない。重複するガードは非決定性を引き起こし、実行エンジンが任意の経路を選択することになる。例: [inventory > 0] 対比して [inventory == 0] は、単一の有効な経路を保証する。
2. do即時行動からのアクティビティ
エントリおよびエグジット 動作は原子的かつ中断されずに実行されなければなりません。状態の初期化、フラグの更新、または同期的なクリーンアップのために使用してください。長時間実行されるプロセス、イベントリスナー、またはポーリングループは、必ず do / コンパートメント内にのみ配置され、優先度の高いトリガーによって安全に中断または強制実行されるべきです。
3. 階層的グループ化によって遷移の「スパゲッティ」を回避する
複雑に交差する遷移の網は、スコープが適切でない境界を示しています。複数の状態が同じエラーまたはキャンセル経路を共有する場合、それらを 複合状態 にラップすることで、視覚的なごちゃごちゃを減らし、モジュール設計を強制し、主な実行経路をすぐに認識できるようにします。
4. 図のレイアウトと構文の明確さを最適化する
-
厳格な構文準拠:常に遷移を
トリガー [ガード] / 効果の形式で記述してください。使用しないコンポーネントはクリーンに省略し、 dangling スラッシュや空の括弧を残さないでください。 -
方向性のフロー制御:レイアウトディレクティブ(例:
-right->,-down->)を使用して、主な「ハッピーパス」を垂直または水平方向に誘導し、例外やエラー状態を周辺にルーティングしてください。 -
簡潔なガード式:論理条件を短く、ドメイン固有のものに保ってください。冗長な自然言語を正確な識別子(例:
[有効なトークン保有]の代わりに[認証サービスがセッションが有効かつ承認済みであることを確認した場合]).
結論
状態機械図は単なる文書化の副産物ではなく、動的システム動作の実行可能な設計図です。状態、内部動作、遷移ルールを厳密に定義することで、エンジニアは実行時における曖昧さを排除し、モデル化層でビジネス制約を強制し、複雑なイベントストリーム下でも予測可能な反応を示すシステムを構築できます。
提示された事例は、UML 2.0の状態機械が高レベルのビジネスワークフローから低レベルのハードウェア制御ループまでスケーラブルであることを示している。厳密なガード設計、適切な行動の分離、明確な視覚的アーキテクチャと組み合わせることで、状態モデリングは抽象的な要件と決定論的な実装の間のギャップを埋める強力なツールとなる。これらのメカニズムを習得することで、システム内のすべてのオブジェクトが、自分が何をしているのか、なぜその行動をしているのか、そして次にどこへ行くべきかを正確に把握できるようになる。
