















O Guia Definitivo sobre a Notação Textual do SysML v2
A Linguagem de Modelagem de Sistemas versão 2 (SysML v2) marca uma mudança significativa na engenharia de sistemas. Ao se afastar das rígidas restrições gráficas baseadas no UML do SysML v1, o SysML v2 introduz uma sintaxe textual orientada pela linguagem. Essa sintaxe trata estrutura, comportamento, requisitos e análise como elementos de texto profundamente integrados.
Este guia abrangente analisa os pilares principais, conceitos e sintaxe do SysML v2 usando um exemplo concreto de AutonomousDrone exemplo de projeto.
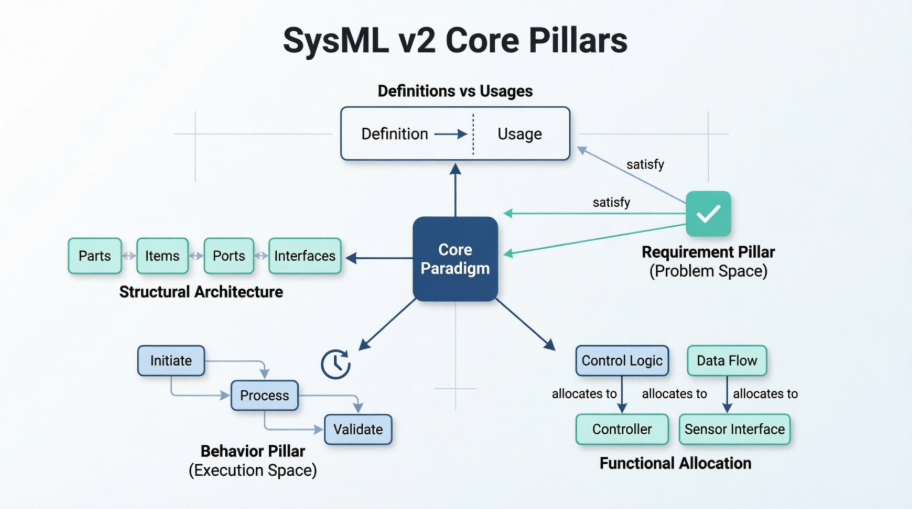
1. O Paradigma Central: Definições vs. Usos
O conceito arquitetônico mais importante no SysML v2 é a separação rígida entre Definições (planos) e Usos (instâncias contextuais).
-
O
defPalavra-chave: Indica uma definição reutilizável, tipo ou plano de elemento. Ela não existe como um objeto físico até ser usada. -
Sem
defPalavra-chave: Indica um uso. Representa uma ocorrência real ou instância de componente dentro de um sistema pai específico.
// DEFINIÇÃO: Um plano reutilizável para qualquer bateria
part def Battery;
// USO: Uma instância específica de uma bateria dentro do nosso sistema de drone
part powerSource : Battery;
Essa distinção permite que engenheiros definam um componente uma vez e o reutilizem em múltiplos subsistemas com nomes, configurações e conexões internas diferentes.
2. Arquitetura Estrutural: Peças, Itens e Portas
O SysML v2 divide arquiteturas físicas ou lógicas em componentes, as coisas que fluem por eles e as interfaces que os conectam.
Peças e Itens
-
part def(Bloco / Componente): Define um componente estrutural, físico ou lógico do sistema. -
item def(Item de Fluxo): Define elementos não fixos — como fluxos de dados, fluidos, força ou eletricidade — que fluem entre partes.
Portas e Interfaces
-
def porta(Especificação de Interface): Define uma fronteira de interface, indicando explicitamente quais dados ou itens podem entrar (entrada) ou sair (saída).
Aqui está como esses componentes são declarados e aninhados dentro de um namespace de sistema:
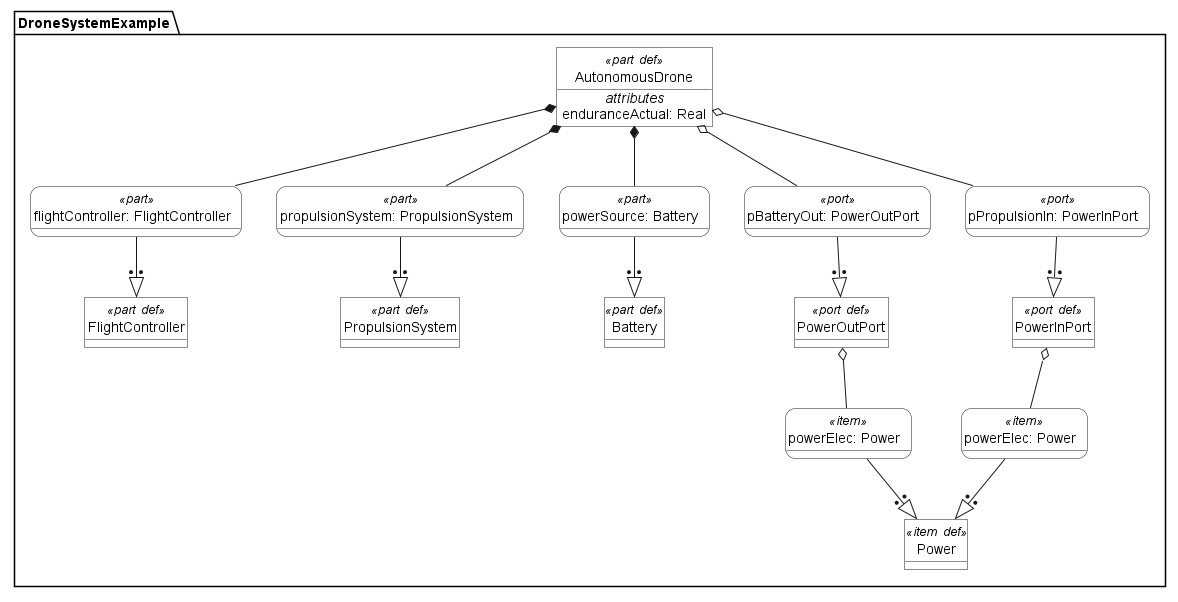
pacote DroneSystemExample {
privado importar ScalarValues::*;
privado importar SI::*;
// Modelos Básicos (Definições)
item def Potência;
porta def PotênciaSaida {
saída item potênciaElec : Potência;
}
porta def PotênciaEntrada {
entrada item potênciaElec : Potência;
}
parte def ControladorVoo;
parte def SistemaPropulsão;
parte def Bateria;
// Contexto do Sistema Integrado
parte def DroneAutônomo {
// Atributos / Propriedades de Valor
atributo autonomiaAtual : Real;
// Uso de Subpartes (Instanciando as definições)
parte controladorVoo : ControladorVoo;
parte sistemaPropulsão : SistemaPropulsão;
parte fontePotência : Bateria;
// Uso de Portas (Instanciando as interfaces)
porta pBateriaSaida : PotênciaSaida;
porta pPropulsãoEntrada : PotênciaEntrada;
}
}
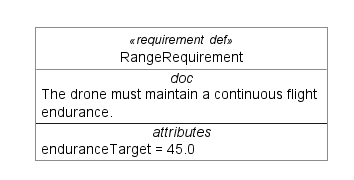
3. O Pilar de Requisitos (Espaço do Problema)
No SysML v1, os requisitos eram frequentemente blocos de texto isolados da matemática de engenharia. No SysML v2, os requisitos são definições de texto de primeira classe contendo metadados, texto descritivo e atributos fortemente tipados para verificação automatizada.
requisito def AlcanceRequisito {
doc /* O drone deve manter uma autonomia de voo contínua de pelo menos 45 minutos. */
atributo autonomiaAlvo : Real = 45.0;
}
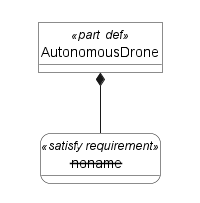
Rastreabilidade com satisfazer
Para fechar o ciclo entre o espaço do problema (requisitos) e o espaço da solução (estrutura), o SysML v2 utiliza palavras-chave de relacionamento explícitas como satisfazer diretamente dentro do contexto da parte:
parte def DroneAutônomo {
// Instancia um uso de requisito para satisfazer o mapeamento de definição de forma clara
satisfazer requisito : AlcanceRequisito;
}
4. O Pilar de Comportamento (Espaço de Execução)
O SysML v1 forçava uma divisão clara entre estrutura (Diagramas de Blocos Internos) e comportamento (Diagramas de Atividade). O SysML v2 remove completamente essa barreira ao tornar ações e fluxos de controle elementos estruturais nativos e no escopo.
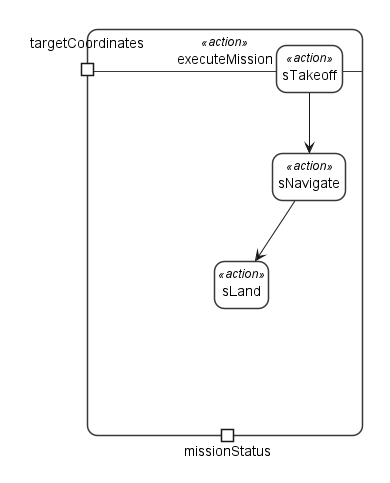
Ações Sequenciais e Fluxo de Controle
Usando o açãopalavra-chave, você pode declarar funções que aceitam entradas (em) e passam saídas (saída). Os fluxos de controle são escritos linearmente usando a então palavra-chave, eliminando a necessidade de diagramas de fluxo de controle complexos.
ação executeMissão {
em coordenadasAlvo;
saída statusMissão;
ação sDescolagem;
então ação sNavegação;
então ação sAterrissagem;
}
5. Alocação Funcional: Conectando Comportamento à Estrutura
Alocação responde à pergunta fundamental da engenharia de sistemas: Qual componente realiza qual função?
O SysML v2 trata isso de forma limpa usando a realizar palavra-chave dentro de um bloco de uso de parte. Usando Notação de Ponto (.), você pode acessar profundamente loops de ação aninhados para mapear operações diretamente para hardware físico.
parte def DroneAutônomo {
// Sub-partes alocam comportamento explicitamente 'realizando' seus passos atribuídos
parte controladorVoo : ControladorVoo {
realizar executeMissão.sNavegação;
}
parte sistemaPropulsão : SistemaPropulsão {
realizar executeMissão.sDescolagem;
}
// Definição de comportamento embutido
ação executeMissão {
ação sDescolagem;
então ação sNavegação;
então ação sAterrissagem;
}
}
Resumo das Palavras-Chave Principais
| Palavra-chave | Espaço | Propósito |
|---|---|---|
pacote |
Estrutural | Define um namespace container para organizar seu modelo. |
importação privada |
Estrutural | Importa bibliotecas padrão externas (como ValoresEscalares ou SI unidades) dentro do escopo sem vazá-las para baixo na cadeia. |
def |
Paradigma | Indica uma planta-reutilizável ou definição de tipo. |
parte / item |
Estrutural | Declara um componente físico/lógico ou um fluxo de fluido/dados que percorre o sistema. |
porta |
Estrutural | Estabelece uma fronteira de interface que define entrada e saída fluxos. |
requisito |
Problema | Define um contrato baseado em texto que contém atributos tipados e metas matemáticas. |
atender |
Relação | Conecta um elemento estrutural diretamente ao requisito que atende. |
ação |
Execução | Define uma etapa comportamental ou função operacional. |
então |
Execução | Força a ordem de execução sequencial entre ações. |
realizar |
Alocação | Mapeia uma ação comportamental diretamente à parte física responsável por executá-la. |
Exemplo Completo do SysML V2: Três Pilares
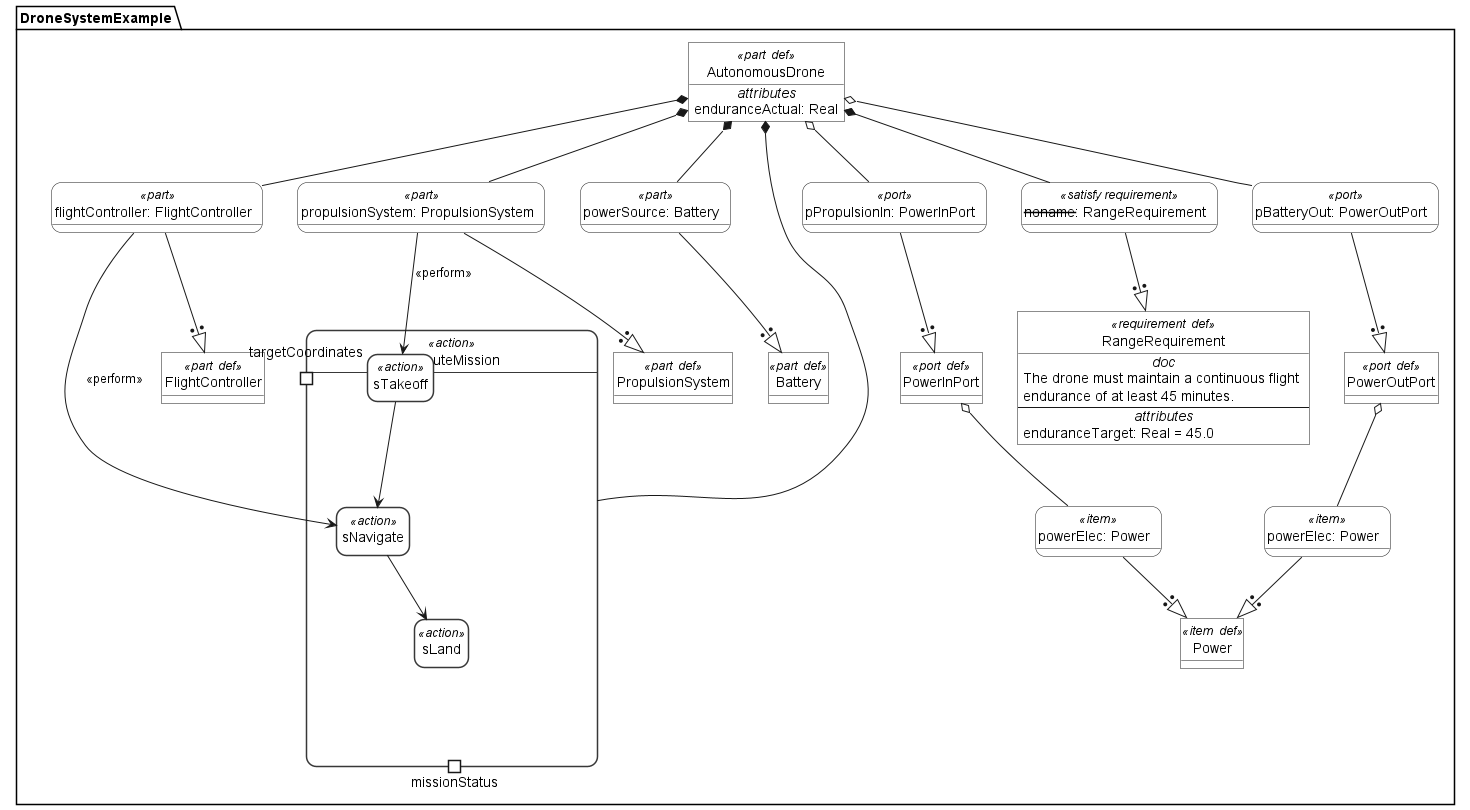
pacote DroneSystemExample {
privado importar ScalarValues::*;
privado importar SI::*;
// ==========================================
// DEFINIÇÕES BÁSICAS DO PROTÓTIPO
// ==========================================
item def Power;
porta def PowerOutPort {
saída item powerElec : Power;
}
porta def PowerInPort {
entrada item powerElec : Power;
}
part def FlightController;
part def SistemaDePropulsao;
part def Bateria;
// ==========================================
// 1. PILAR DE REQUISITOS (Espaço do Problema)
// ==========================================
requisito def RequisitoDeAlcance {
doc /* O drone deve manter uma autonomia de voo contínua de pelo menos 45 minutos. */
atributo metaDeAutonomia : Real = 45.0;
}
// ==========================================
// 2. PILARES DE ESTRUTURA E COMPORTAMENTO
// ==========================================
part def DroneAutonomo {
atributo enduranceActual : Real;
// As subpartes alocam comportamento explicitamente ‘realizando’ seus passos atribuídos
parte flightController : FlightController {
realizar executeMission.sNavigate;
}
parte propulsionSystem : PropulsionSystem {
realizar executeMission.sTakeoff;
}
parte fonteDeEnergia : Bateria;
// Conexões de interface
porta pBatteryOut : PowerOutPort;
porta pPropulsionIn : PowerInPort;
// FIX 1: Instancia um uso de requisito para satisfazer o mapeamento de definição de forma limpa
satisfazer requisito : RequisitoAlcance;
// ==========================================
// 3. PILAR DE COMPORTAMENTO (Espaço de Execução)
// ==========================================
// Definições de ação limpas e sequenciais nativamente no escopo
ação executeMission {
em coordenadasAlvo;
fora statusMissao;
ação sDecolagem;
então ação sNavegar;
então ação sAterrissagem;
}
}
}
